
Driver puente H tb6612fng
En este tutorial vamos a hablar un poco de que es un drive puente H tb6612fng, como funciona y como se debe realizar la conexión para el control de dos motores con Arduino:
Driver TB6612FNG:
El driver para motores TB6612FNG posee dos puentes H, puede controlar hasta dos motores de DC con una corriente costante de 1.2A (3.2A pico). Dos señales de entrada (IN1 y IN2) pueden ser usadas para controlar el motor en uno de cuatro modos posibles: CW(giro en sentido de las manecillas del reloj), CCW (en contra de las manecillas), short-brake y stop. Las dos salidas de motores (A y B) pueden ser controladas de manera separada, la velocidad de cada motor es controlada mediante una señal PWM con una frecuencia de hasta 100kHz. El pin STBY cuando es puesto en HIGH coloca al motor en modo de standby. El driver posee diodos internos de protección.
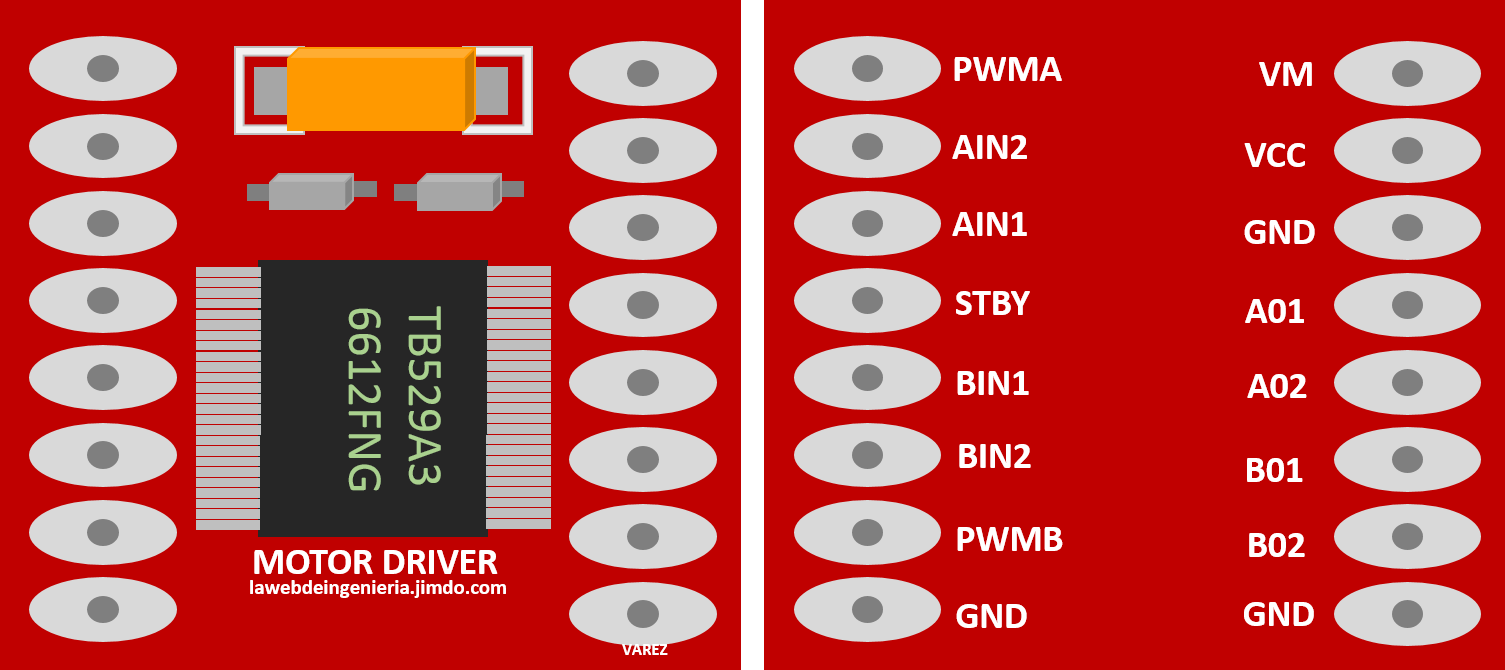
A este módulo se le pueden adecuar dos motores conectados a los pines de salida AO1, AO2 para un motor y los pines BO1 y BO2 para el segundo. Los motores pueden ser polarizados con hasta 15V a una corriente media de 1.2A y un máximo de 3.2A. Cada motor puede ser controlado a través de un H-Puente para moverse en sentido horario y anti horario donde su la velocidad de cada motor es controlada a través de señales PWM, PWMA y PWMB, una señal para cada motor (acorde a la necesidad del usuario), en donde cada señal puede llegar a tener una frecuencia de hasta 100KHz, aunque si no se desea manipular la velocidad, esta puede llegar a ser constante (velocidad máxima). (Todos los pines de entrada lógica utilizan una resistencia pull-down interna de 200KOhm. Esto significa que se fijan en un nivel bajo de forma predeterminada. Para obtener un estado alto, sólo se suministra un nivel de tensión al pin VCC para activarlos).
Componentes y funciones claves del Driver
- Canales de Motor (A y B):
- El TB6612FNG tiene dos canales, A y B, que permiten controlar dos motores de forma independiente.
- Cada canal tiene dos salidas (AO1, AO2 para el canal A y BO1, BO2 para el canal B) que se conectan a los terminales del motor.
- Pines de Entrada de Control:
- AIN1, AIN2 (para Motor A) y BIN1, BIN2 (para Motor B): Estos pines controlan la dirección de cada motor. Dependiendo de las señales que reciba, el motor puede girar hacia adelante, hacia atrás o detenerse.
- Entradas de PWM (PWMA y PWMB):
- Los pines PWM permiten controlar la velocidad de los motores utilizando Modulación por Ancho de Pulso (PWM). Al ajustar el ciclo de trabajo de la señal PWM (un valor entre 0 y 255 en Arduino), se puede variar la velocidad del motor.
- Pin STBY (Standby):
- Este pin activa o desactiva el modo operativo del driver. Cuando STBY está en alto (HIGH), el driver está listo para operar; cuando está en bajo (LOW), el driver entra en modo de ahorro de energía y los motores no funcionarán.
Cómo Funciona el Control de un Motor:
- Control de Dirección:
- Al enviar señales específicas a los pines de control (AIN1, AIN2 o BIN1, BIN2), se puede controlar la dirección del motor:
- AIN1 = HIGH, AIN2 = LOW: El Motor A gira en una dirección (por ejemplo, hacia adelante).
- AIN1 = LOW, AIN2 = HIGH: El Motor A gira en la dirección opuesta (por ejemplo, hacia atrás).
- AIN1 = LOW, AIN2 = LOW: El Motor A está detenido.
- AIN1 = HIGH, AIN2 = HIGH: Freno, el motor se detiene rápidamente.
- Al enviar señales específicas a los pines de control (AIN1, AIN2 o BIN1, BIN2), se puede controlar la dirección del motor:
- Control de Velocidad:
- El pin PWMA (para el Motor A) o PWMB (para el Motor B) se conecta a un pin PWM del Arduino. Al cambiar el valor de la señal PWM, se ajusta la velocidad del motor:
- PWM = 0: El motor está apagado (sin movimiento).
- PWM = 255: El motor funciona a máxima velocidad.
- Valores intermedios (ej., PWM = 128): El motor gira a una velocidad intermedia.
- El pin PWMA (para el Motor A) o PWMB (para el Motor B) se conecta a un pin PWM del Arduino. Al cambiar el valor de la señal PWM, se ajusta la velocidad del motor:
- Modo Standby:
- El pin STBY debe estar en alto (HIGH) para que el driver funcione. Si se pone en bajo (LOW), el TB6612FNG entra en modo standby, lo que reduce el consumo de energía y desactiva los motores.
El TB6612FNG traduce las señales lógicas del Arduino en acciones físicas (rotación de motores). Controla tanto la dirección como la velocidad de dos motores DC, lo que lo hace ideal para aplicaciones robóticas y de control de movimiento. Su capacidad de manejo de corriente, eficiencia energética, y modo standby lo hacen un componente versátil para proyectos con motores.
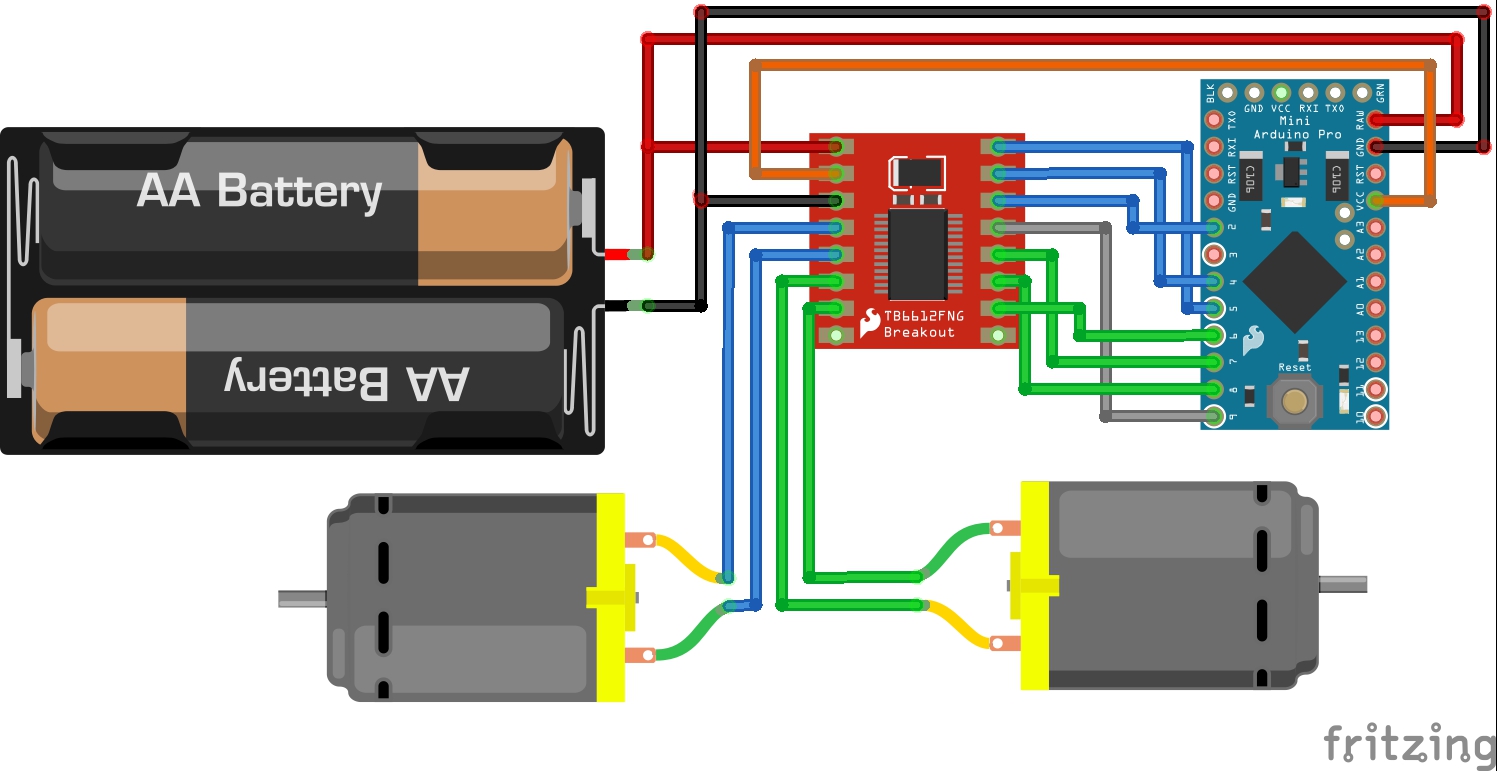
Diagrama básico de conexión:
Pública tu duda o comentario
Resuelve tus dudas con la comunidad.
(0) Comentarios
No registra comentarios, se el primero en comentar.
Publicar